Abstract
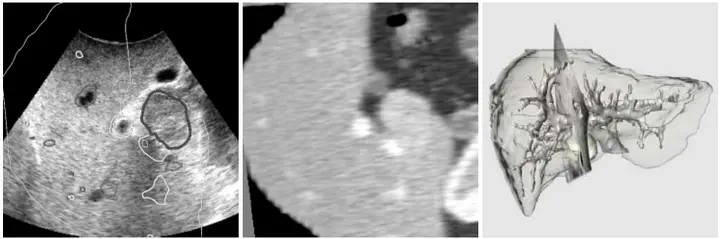
An overview of the current status of the development of our navigation system for resection of liver tumours is given. The system is based on intraoperative three-dimensional (3D) ultrasound volumes for image-guided navigation of surgical instruments. It is also possible to perform a virtual 3D planning of the tumour resection and to non-rigidly register these preoperative models to the intraoperative ultrasound volume.
Type
Publication
Proc. Computer Assisted Radiology and Surgery (CARS) (H. Lemke et al, eds.), International Congress Series, Volume 1268, June 2004, Pages 758-763
Hans Lamecker
Director, Software Development
Advancing 3D analysis, planning, design and manufacturing using innovative computational methods and tools